Gaussian process (GP) regression scales cubically in
- Subset of data,
- Subset of regressors,
- Fully independent training conditional,
- Randomised Nyström.
I originally wrote these notes for a student, but I thought they would make for a nice blog post as well!
Preliminaries
Suppose we have a multivariate Gaussian partitioned into two vectors
where
for some covariance function
We can write the marginal distribution
Basics of Gaussian process regression
Given a set of pairs of training points and outputs
The assumptions for GP regression are:
- Gaussian observations:
‘s are related to via additive noise : - Gaussian function evaluations: function values are distributed according to
Our goal is to compute the posterior predictive distribution . Let’s first compute the joint Gaussian:
since it’s easy to go from a joint to a conditional via a Schur complement. The mean of
Since
In summary,
Using what we know about conditional Gaussians, the posterior is just
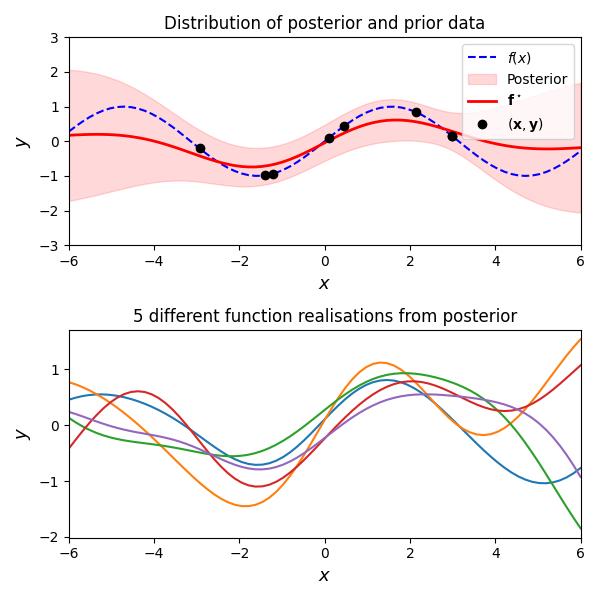
Draws from the predictive distribution
Let’s look at a concrete example of a GP and and a few draws.
Inducing points approximations
The full predictive distribution requires the inversion of a
Now the conditional independence approximation is the following:
that is,
Let us explore how
Subset of data (SD)
We simply select
Subset of regressors (SoR)
First, we note that
which means
The SoR approximation is simply to take this quantity as deterministic, i.e.,
The SoR covariance function is therefore
This can be seen by evaluating
We can use the covariance function to compute
We can rewrite this as follows using the Sherman-Morrison-Woodbury identity:
Fully Independent Training Conditional (FITC)
This is a fairly simple extension of SoR, at least from a linear algebra point of view. Recall
from which
While the SoR approximation causes the posterior covariance matrix to degenerate by the assumption that
FITC is basically a compromise between a degenerate (zero) covariance and the full covariance
Like before, we combine this with our prior
Randomised Nyström
Let
References
- Quinonero-Candela, Joaquin, and Carl Edward Rasmussen. “A unifying view of sparse approximate Gaussian process regression.” Journal of machine learning research 6.Dec (2005): 1939-1959.
- Halko, Nathan, Per-Gunnar Martinsson, and Joel A. Tropp. “Finding structure with randomness: Probabilistic algorithms for constructing approximate matrix decompositions.” SIAM review 53.2 (2011): 217-288.